智能網(wǎng)聯(lián)汽車,作為新一代信息技術(shù)與汽車產(chǎn)業(yè)深度融合的產(chǎn)物,正引領(lǐng)著全球汽車產(chǎn)業(yè)的深刻變革。其核心在于通過先進(jìn)的通信技術(shù),實現(xiàn)車輛與萬物(V2X, Vehicle to Everything)的互聯(lián),并借助高度自動化的控制技術(shù),最終達(dá)成安全、高效、舒適、節(jié)能的出行愿景。本文旨在探討其關(guān)鍵技術(shù)與未來發(fā)展趨勢。
一、 核心通信技術(shù):構(gòu)建車聯(lián)萬物之網(wǎng)
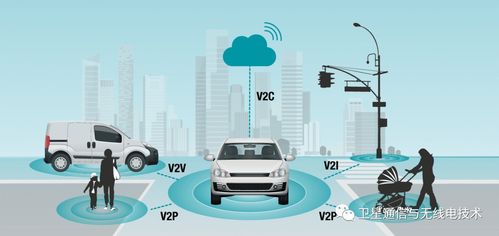
智能網(wǎng)聯(lián)的實現(xiàn),依賴于一套高效、可靠、低延時的通信網(wǎng)絡(luò),主要包括:
- 蜂窩車聯(lián)網(wǎng)(C-V2X):以4G/5G/未來6G蜂窩網(wǎng)絡(luò)為基礎(chǔ),是實現(xiàn)大范圍、廣覆蓋通信的主力。5G憑借其超低時延(可低于1毫秒)、超高可靠性和大帶寬特性,為遠(yuǎn)程駕駛、高精度地圖實時更新、密集車隊協(xié)同等場景提供了可能。
- 專用短程通信(DSRC):基于IEEE 802.11p標(biāo)準(zhǔn),在短距離內(nèi)實現(xiàn)車輛與車輛(V2V)、車輛與基礎(chǔ)設(shè)施(V2I)間的直接、快速通信。雖然在產(chǎn)業(yè)化進(jìn)程上曾面臨挑戰(zhàn),但在特定場景(如交叉路口預(yù)警)中仍有其價值。
- 車載以太網(wǎng)與總線技術(shù):隨著汽車電子電氣架構(gòu)從分布式向域集中式、乃至中央計算式演進(jìn),高帶寬、低延遲的車載以太網(wǎng)正逐步取代傳統(tǒng)的CAN、LIN總線,成為車內(nèi)各域控制器、傳感器、執(zhí)行器之間高速數(shù)據(jù)傳輸?shù)摹吧窠?jīng)系統(tǒng)”。
二、 關(guān)鍵自動控制技術(shù):賦予汽車“駕駛智能”
通信是感知與決策的信息通道,而自動控制則是決策的執(zhí)行手段,兩者緊密結(jié)合,構(gòu)成閉環(huán)。
- 環(huán)境感知融合技術(shù):通過毫米波雷達(dá)、激光雷達(dá)(LiDAR)、攝像頭、超聲波傳感器等多源異構(gòu)傳感器的數(shù)據(jù)融合,構(gòu)建車輛周圍環(huán)境的精準(zhǔn)、實時三維模型,為決策控制提供依據(jù)。
- 決策規(guī)劃技術(shù):基于感知信息、高精度地圖與定位(結(jié)合GNSS、IMU和輪速計等),利用人工智能算法(特別是深度學(xué)習(xí)與強化學(xué)習(xí)),在復(fù)雜的動態(tài)交通環(huán)境中進(jìn)行行為預(yù)測、路徑規(guī)劃和運動決策。
- 車輛縱向與橫向協(xié)同控制:通過先進(jìn)的底盤線控技術(shù)和多目標(biāo)優(yōu)化控制算法,精確控制車輛的加速、制動(縱向)和轉(zhuǎn)向(橫向),實現(xiàn)自適應(yīng)巡航(ACC)、車道保持(LKA)、自動緊急制動(AEB)等功能,并向更高級別的協(xié)同式自適應(yīng)巡航(CACC)和編隊行駛發(fā)展。
三、 研究服務(wù)與產(chǎn)業(yè)協(xié)同
智能網(wǎng)聯(lián)汽車的發(fā)展離不開跨學(xué)科、跨行業(yè)的深度研究服務(wù)與協(xié)同:
- 技術(shù)標(biāo)準(zhǔn)與法規(guī)研究:推動C-V2X、數(shù)據(jù)安全、功能安全(ISO 26262)、預(yù)期功能安全(SOTIF)等國際國內(nèi)標(biāo)準(zhǔn)的制定與統(tǒng)一,以及相關(guān)道路測試、準(zhǔn)入和權(quán)責(zé)法規(guī)的研究。
- 測試驗證平臺建設(shè):構(gòu)建包括仿真(軟件在環(huán)、硬件在環(huán))、封閉場地、實際道路在內(nèi)的“三支柱”測試驗證體系,特別是基于數(shù)字孿生技術(shù)的虛擬仿真測試,能極大加速開發(fā)進(jìn)程并覆蓋海量長尾場景。
- 云控基礎(chǔ)平臺與數(shù)據(jù)服務(wù):建設(shè)車路云一體化的云控基礎(chǔ)平臺,實現(xiàn)車輛運行狀態(tài)、道路環(huán)境信息的匯聚、計算與分發(fā),為智能駕駛、交通管理、出行服務(wù)提供數(shù)據(jù)支撐。
四、 未來發(fā)展趨勢展望
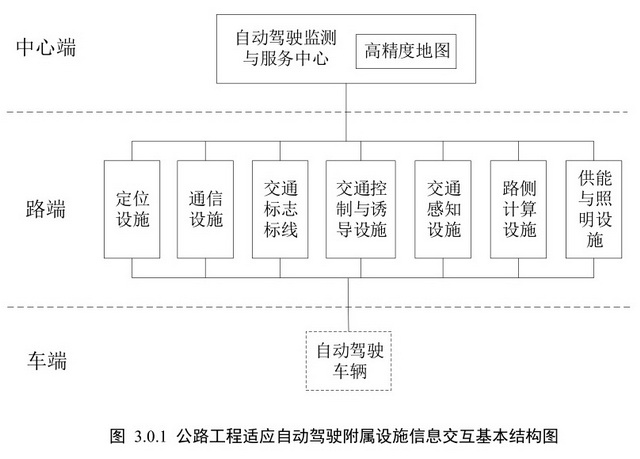
1. “車路云”一體化深度融合:未來的發(fā)展將超越“單車智能”的局限,走向車端、路側(cè)(智慧道路)、云端(邊緣云/中心云)協(xié)同的體系化智能,通過全局信息共享與協(xié)同決策,解決單車感知局限,提升整體交通效率與安全冗余。
2. 通信與計算的邊緣化:為滿足極低時延要求,計算任務(wù)將更多下沉至路側(cè)邊緣計算單元(MEC)或車輛自身,實現(xiàn)本地化的快速感知、決策與控制。
3. 人工智能全面賦能:AI將更深層次地滲透到感知、預(yù)測、決策、控制的全鏈條,從依賴規(guī)則到數(shù)據(jù)驅(qū)動,實現(xiàn)更擬人化、更適應(yīng)復(fù)雜場景的駕駛智能。
4. 數(shù)據(jù)安全與隱私保護(hù)成為基石:隨著車輛網(wǎng)聯(lián)化程度加深,網(wǎng)絡(luò)安全、數(shù)據(jù)安全和個人隱私保護(hù)將成為技術(shù)開發(fā)和產(chǎn)品設(shè)計的核心前提,相關(guān)防護(hù)技術(shù)與法規(guī)將同步強化。
5. 應(yīng)用場景商業(yè)化落地加速:技術(shù)將從測試示范逐步走向規(guī)模化商用,在特定場景如高速公路、物流園區(qū)、港口、礦區(qū)及城市RoboTaxi等領(lǐng)域率先實現(xiàn)商業(yè)閉環(huán)。
智能網(wǎng)聯(lián)汽車是通信技術(shù)與自動控制技術(shù)交匯創(chuàng)新的典范。其未來發(fā)展必將是一個技術(shù)持續(xù)突破、標(biāo)準(zhǔn)法規(guī)不斷完善、產(chǎn)業(yè)生態(tài)協(xié)同共建的長期過程,最終將重塑我們的出行方式與社會交通形態(tài)。